#include <Visualizable.h>
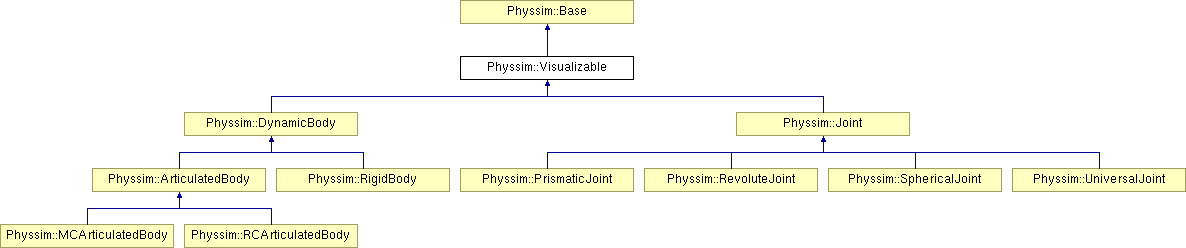
Inheritance diagram for Physsim::Visualizable:
Public Member Functions | |
| Visualizable (const Visualizable *v) | |
| virtual void | clone (BasePtr &cloned, bimap< BasePtr, BasePtr > *obj_map=NULL) const |
| Implements Base::clone(). | |
| virtual void | load_state (BaseConstPtr object, bimap< BasePtr, BasePtr > *correspondence=NULL) |
| Implements Base::load_state(). | |
| virtual void | save_state (BasePtr object, bimap< BasePtr, BasePtr > *correspondence=NULL) const |
| Implements Base::save_state(). | |
| virtual void | update_visualization () |
| Updates the visualization using the appropriate transform. | |
| virtual void | set_visualization_data (SoNode *vdata) |
| Sets the visualization data from a node. | |
| virtual void | set_visualization_data (SoSeparatorWrapperPtr vdata) |
| Sets the visualization data from a SoSeparatorWrapper. | |
| virtual void | save_to_xml (XMLTreePtr node, std::list< BaseConstPtr > &shared_objects) const |
| Implements Base::save_to_xml(). | |
| virtual void | load_from_xml (XMLTreeConstPtr node, std::map< std::string, BasePtr > &id_map) |
| Implements Base::load_from_xml(). | |
| void | set_visualization_transform (const Matrix4 &T) |
| Sets the transform for this visualization data. | |
| SoNode * | get_visualization_data () const |
| Gets the visualization data for this object. | |
Static Public Member Functions | |
| static SoSeparator * | construct_from_node (XMLTreeConstPtr node, const std::map< std::string, BasePtr > &id_map) |
| Utility method for load_from_xml(). | |
Protected Attributes | |
| SoSeparatorWrapperPtr | _vizdata |
| The underlying visualization data. | |
| SoSeparator * | _separator |
| The top-level separator (containing _vtransform and _vizdata). | |
| SoTransform * | _vtransform |
| The transform applied to _vizdata. | |
This class uses the SoSeparatorWrapper class to permit sharing and serialization of visualization data.
| void Visualizable::update_visualization | ( | ) | [virtual] |
Updates the visualization using the appropriate transform.
derived classes may override this method to set the transform right before it is updated, if desired
Reimplemented in Physsim::MCArticulatedBody, and Physsim::RCArticulatedBody.
| SoSeparator * Visualizable::construct_from_node | ( | XMLTreeConstPtr | node, | |
| const std::map< std::string, BasePtr > & | id_map | |||
| ) | [static] |
Utility method for load_from_xml().
This method searches for visualization-filename, visualization-separator-id, and visualization-primitive-id attributes for a given node and creates a separator based on the attribute found.
| void Physsim::Visualizable::set_visualization_transform | ( | const Matrix4 & | T | ) | [inline] |
Sets the transform for this visualization data.
 1.5.1
1.5.1