#include <DynamicBody.h>
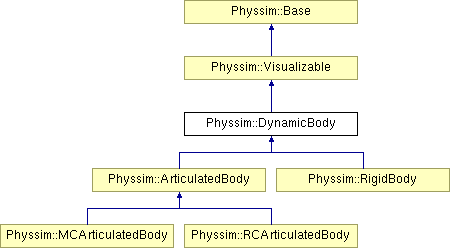
Inheritance diagram for Physsim::DynamicBody:
Public Member Functions | |
| DynamicBody (const DynamicBody *d) | |
| virtual void | calc_fwd_dyn ()=0 |
| Forces a recalculation of forward dynamics. | |
| virtual VectorN | get_state ()=0 |
| Gets the state vector for the dynamic body. | |
| virtual VectorN | get_state_deriv ()=0 |
| Gets the state-derivative vector for the dynamic body. | |
| virtual void | set_state (const VectorN &state)=0 |
| Sets the state for the dynamic body. | |
| virtual void | reset_accumulators ()=0 |
| Resets the force and torque accumulators on the dynamic body. | |
| virtual void | transform (const Matrix4 &T)=0 |
| Transforms the dynamic body by the given transform. | |
This class allows both unarticulated and articulated rigid bodies to be treated abstractly. In particular, both must implement four functions (set_state(), get_state(), get_state_deriv(), and reset_accumulators()) used for integrating the body state in the simulation.
 1.5.1
1.5.1